Feeling What Mice Are Able to Sense
Mario Sebasco (MSR '17) looks back on his final project from the Master of Science in Robotics program and how it prepared him for his engineering job today.
By Mario Sebasco (MSR '17)
As humans, we are born with a set of built-in senses that we become very adept at using. We use these tools to perceive and interact with the world around us. Similarly, animals interact with their environment using their own set of senses.
Northwestern University Professor Mitra Hartmann has spent years researching rat whiskers, and her group developed a mechanical rat whisker sensor that is capable of obtaining moment and force information upon contact with an object. For my final project in Northwestern's Master of Science in Robotics (MSR) program, I looked to create a human interface for the device. Specifically, I wanted to design and build a system that would give humans control over an array of rat whiskers, and accurately and intuitively relate that information back to the user in the form of haptic feedback. I wanted to see if we could build a system that uses the knowledge of how mice use their whiskers and intuitively map that information to something a person might understand.
I was interested in this project because I could see this research ultimately being applied to scale in multiple fields. In surgical robotics and other areas where high precision is required, the use of visual feedback alone may not be enough, and haptics may prove to be the best solution. Similarly, in applications where other sensory information just isn't possible due to lack of light, or other obstructions, having the added sense of touch could make difficult operations exponentially simpler.
When thinking about this project, I had to ask questions like, “Can our own fingers be thought of in a way that is analogous to mouse whiskers?” or “What senses would we use to accomplish what a mouse would with its whiskers?” In doing so, I was able to begin to think about a system that expands our understanding of how other animals perceive the world and begin to develop novel technologies people can use to interact with robots.
The project consisted of creating an interface between Professor Hartmann’s mechanical rat whiskers and a human user. To this end, my task was essentially to begin thinking about how one could take this novel sensor and allow a person to intuitively use it to interact with, and learn from, a certain environment. To me, this was a really interesting concept — the idea that, as humans, we could start to understand how another animal might perceive the world around it, and how this could impact the current state of sensor technology.
I was the first person to work on this project, so my primary goal was to create a foundation that could be built upon in future iterations. Therefore, I tried to focus primarily on developing a software library for a range of hardware components and tasks that could be used by future students. This way, even if the approach changed, my work could still be useful.
It was clear to me from the beginning that a project of this magnitude could not be completed in the 10 weeks I had to work on it. As a result, I was faced with the question of how to balance my work. As I mentioned earlier, one of my primary goals was to set up a solid foundation that could be used in the future, however, I also wanted to have a complete proof-of-concept demo in order to motivate and inspire people to pursue this line of work. So, this project taught me to start finding that balance between robustness and completeness when working with limited time, a skill I've since discovered is crucial in industry work.
Today I work as a robotics engineer at HDT Global in Evanston, where I’ve worked on several different projects. In my time here, I have primarily been developing autonomy for a rugged, load-carrying vehicle for farmland applications. I spend most days writing software and testing it in simulation. The rest of the time I spend on hardware, either integrating software or debugging electrical or mechanical issues. Overall, I apply much of what I learned in the MSR program on a daily basis.
I would definitely not be doing what I do today were it not for the MSR program and all the projects we worked on. I think the program did a great job of filling the gaps in my knowledge and made me more competent not only in my background in mechanical engineering but also in electrical engineering and computer science. Those three topics are the foundation of robotics engineering and I rely on them in order to do my job now.
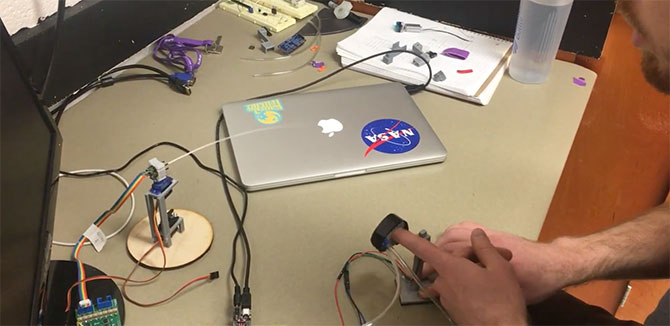
Looking back on my project with Professor Hartmann, it did a great job of preparing me for what I'm doing today. At the end of the 10 weeks, I had a prototype for a board that paired a ring on a user with a single whisker sensor. The board could actually run two whiskers, but ideally, the goal would be to achieve a system with closer to 15 whiskers and rings — about three rings per finger — to provide a fully immersive experience.
I think I left the project headed in a good direction. I'm excited to see what future MSR students can do to further build upon what I started.
Mario Sebasco (MSR '17) is a robotics engineer at HDT Global.
